
NITTAOMEGA XC10
図面はこちら

特長
- 可搬10kg
- 軽量・低価格
- フェールセーフ
- 大口径シリンダとカムロック方式の採用
- 強制分離機構
用途
- 電子部品/小部品などのハンドリング
- 成型品の取り出し
- シーラーガンの交換
- 検査用のロボットのアタッチメント交換
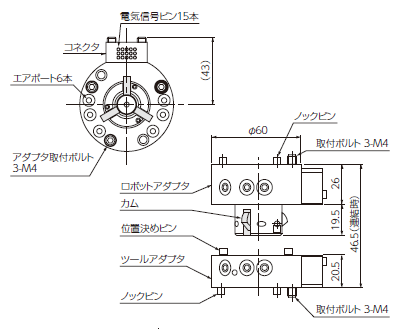
外形寸法
仕様
| 可搬質量 | 10kg | |
|---|---|---|
| 許容モーメント | 29.4Nm | |
| 許容トルク | 34.3Nm | |
| 外径寸法 | φ60mm | |
| 連結時厚み | 46.5mm | |
| 本体材質 | アルミニウム合金 | |
| 位置再現精度 | ±0.010mm | |
| 動作空気圧力 | 0.39~0.59MPa | |
| 本体質量 | ロボット側 | 0.24kg |
| ツール側 | 0.12kg | |
| 電気信号 | 電流値 | 2.5A |
| 芯数 | なし または 15本 | |
| エアポート | ポート数 | M5:6ポート |
| 有効断面積 | 4mm2/ポート | |
| Cv値 | 0.23/ポート | |
| 耐圧 | 0.855MPa | |
| 環境 | 使用温度 | 0~60℃(凍結無きこと) |
| 使用湿度 | 0~95%RH(結露無きこと) | |
 総合カタログ
総合カタログ![]()
| TR15-6JN10 ロボットアダプタ TT15-6JN00 ツールアダプタ |
PDF データ | 2D CAD データ (DXF) |
3D CAD データ (STEP) |
|---|
*CADデータのダウンロードについてはお手数ではございますが、お客様の情報をご入力お願い申し上げます。